Camera Calibration¶
Transforming multiple estimates of 2-D pose (camera scenes) into a 3-D pose (real life, euclidean coordinates) is a classic problem within computer vision. We prefer our method for pose estimation to be robust across a large volume, amenable to a 3+ camera configuration, and practical in nature. This has led Bouchard Lab to use the field calibration method of DLT triangulation as a means of producing 3-D pose estimations from our multiple 2-D pose data sources.
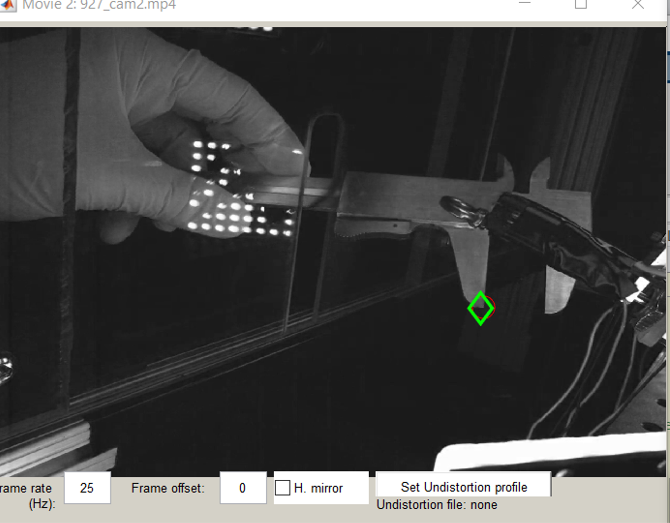
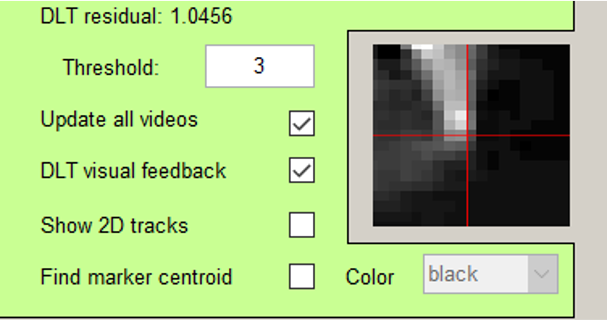
Our solution is to use a wand-based field calibration system that requires us to capture daily or weekly video of a two-point wand. Two discrete end points are then tracked across the camera frames using DLTdv, then the resulting tracked endpoints are uses to estimate the 3-D reaching volume using EasyWand5.
Pose Estimation with DLT¶
A pose, or a 2-D scene, is recorded in a single frame of a video. We record our rat behavior from 3 cameras placed to record a maximal volume of our reaching space. As our scene stays relatively constant frame to frame (our cameras are fixed in place), we would like to transform our 2-D scenes into a full natural 3-D space.
Direct Linear Transformation (DLT)¶
Direct Linear Transformation is an algorithmic approach to transform multiple 2-D poses, or scenes, into a 3-D volume. Here, we overview some basic theory behind DLT. For a more detailed, mathematical conversation, refer to http://www.kwon3d.com/theory/dlt/dlt.html#3d .
The projected plane (camera) is related to an object within the frame. This object (a wand, for our purpose!) is captured across each scene. We seek to relate the object-space reference frame to the image-plane reference frame using the fact that the mapping between images of our object is co-linear. Describing this mapping, then, is our challenge.
Briefly, there exists some transformation for our system that will transform multiple image-plane coordinates ([u1,v1], [u2,v2]..) into object-space coordinates [x,y,z]. This is done by finding, using algorithmic approaches or Sparse Bundle Adjustment, transformations of low or lowest error.
EasyWand and DLTdv7: Field Calibration Software for the People¶
Credit to Hedrick Lab for all calibration software, instructions, and examples! Our lab uses the software DLTdv to label daily approximately minute-long pre-recorded wand calibration videos.
EasyWand software¶
Tutorials and software can be found at https://biomech.web.unc.edu/dltdv/ .
DLTDV software¶
EasyWand Procedure¶
We label between 50-100 images that capture a robust span of the reaching volume. These labels are then loaded into software intended to perform the iterative DLT calibration routine. This software, EasyWand5, can be found at https://biomech.web.unc.edu/wand-calibration-tools/ . We curate points used in the calibration algorithm by hand (ie. manually selecting high outliers, recalibrating, and readjusting our measurements) before using Sparse Bundle Adjustments to obtain a rotation and translational co-efficient matrix.
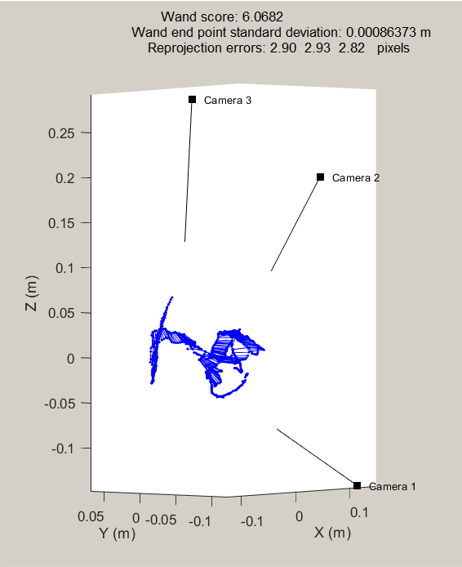
3-D Reconstructed Reaching Volume¶
DLT matrix coefficients for translation and rotation¶
We obtain, from the iterative DLTdv process, a set of co-efficients that represent the rotation and translation of our effective coordinate system. This .csv file is the main input into our ReachPredict3D software pipeline, the other being unique 2-D individual camera DLC predictions.
Benchmarking our pose estimation in 3-D¶
For our lab’s initial pilot behavioral data, we have benchmarked a series of daily calibrations.
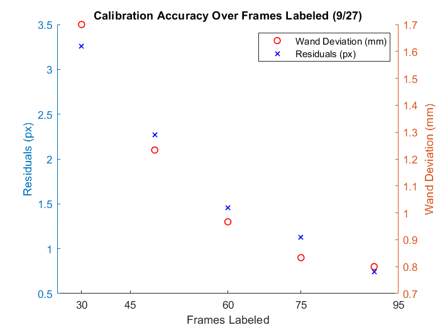
We then compared calibrations across days, using a random daily calibration to determine changes in in the root-mean square error.

We have included our most accurate calibration file for general reconstruction. Time-specific reconstruction is not supported at this time in the general software pipeline.